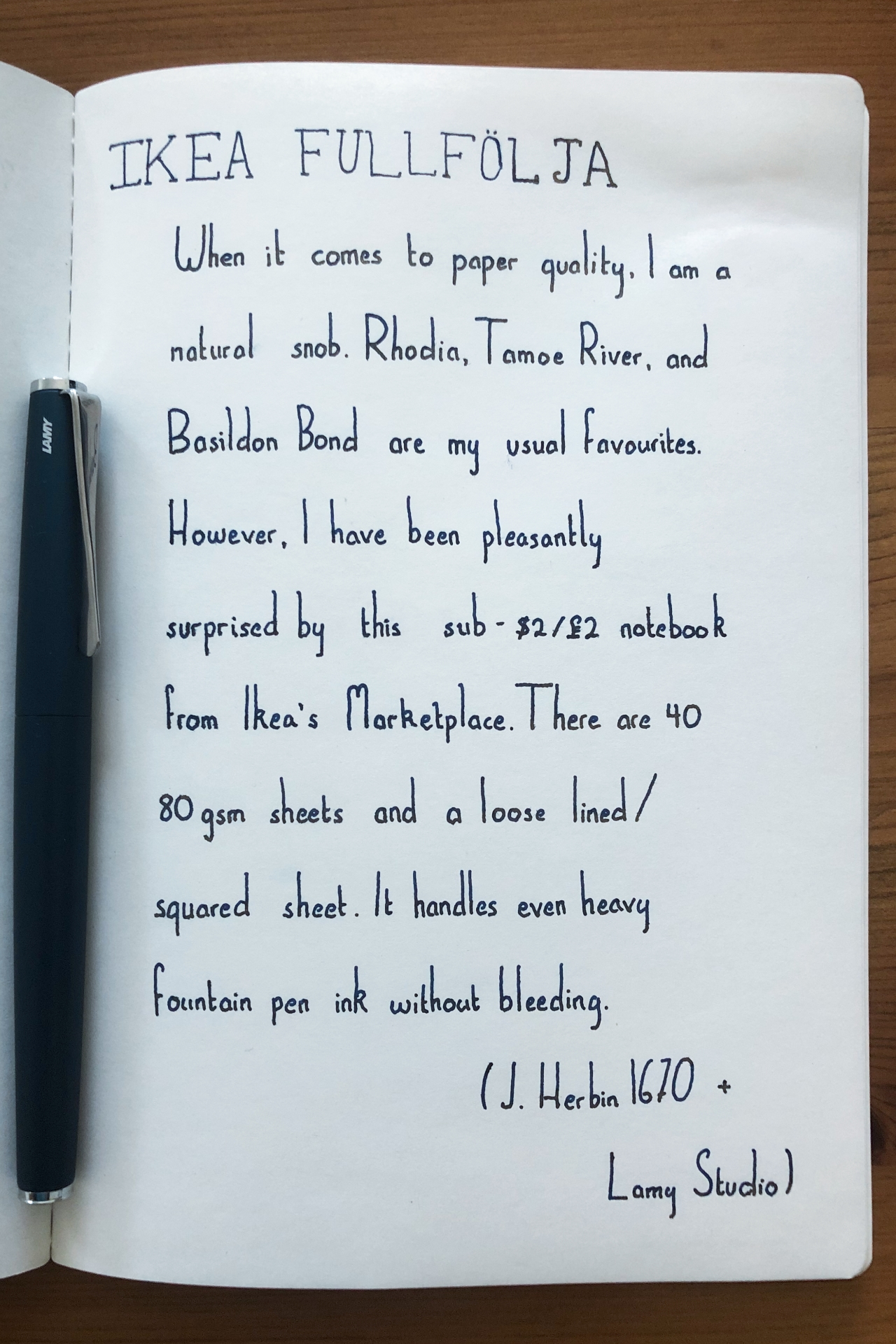
I’m always pleasantly surprised when I come across cheap paper that survives fountain pens: you tend to see the nasty effects of feathering and bleeding. However, Ikea’s Fullfölja notebook line — which cost less than $2 — handle the task well.
I saw only a little bleeding (the paper is only 80gsm) but no feathering. For a such a low cost notebook I can’t complain, although I wouldn’t choose to write in this full time. The cover is reportedly “durable card” although I found it took little effort to scratch it.
Paper has long been one of Sweden’s primary exports, so Ikea’s success here is perhaps inevitable, although this notebook is made in China.
The Fullfölja is available on Ikea’s website (UK; US) or in store in their Marketplace.
Thomas Piketty’s work on income inequality is much cited and discussed; he is considered one of the most influential living economists. I’ve seen his name crop up a lot recently, especially in articles about the economy after coronavirus. However, there’s just one problem: journalists can’t seem to resist mentioning that he’s the “French economist Thomas Piketty”.
The fact that Piketty is French doesn’t particularly matter to most articles that introduce him this way: granted some of his work focused on the French economy and most of his books and articles were published in French before English translations, but this rarely affects the context.
Even Piketty’s own publisher couldn’t resist the phrase in a review in a review on the back cover of Capital in the Twenty First-Century.
For a while I had a hunch that Piketty was introduced more frequently by his nationality than other economists, so I collected data on the matter. Using a list of the “15 most influential living economists” from The Economist in 2014, I used Google search result counts for the exact phrase “Nationality economist Person” to determine overall ratios.1 I have also included Adam Smith, Keynes, and Marx for reference.
Shiller, Piketty, and Keynes are clear outliers. The dominance of Americans both in the list and in the field perhaps suggests that economists are considered American by default by most journalists (and perhaps readers too). Nevertheless, the bottom half of the list comprises those of dual and other nationality. The inclusion of a more international pool of economists might reveal a different trend, although we would expect significantly fewer references to them.
Next, I restricted my search to references to these economists on The Economist’s own website. This ought to reduce false positives in the data too, as references to these names are more likely to be to the economists rather than other individuals of the same name. I suspected that The Economist was particularly prone to this trend.
Economist
Nationality
Total Economist mentions
With Nationality
Ratio
Thomas Piketty
French
2,530
125
4.94%
John Maynard Keynes
British
2,970
3
0.10%
Adam Smith
Scottish
5,200
4
0.08%
Paul Krugnman
American
3,900
1
0.03%
Karl Marx
German
4,050
1
0.02%
Larry Summers
American
2,580
0
0.00%
Robert Shiller
American
1,430
0
0.00%
Daniel Kahneman
Israeli-American
1,150
0
0.00%
Joseph Stiglitz
American
1,030
0
0.00%
Jeffrey Sachs
American
892
0
0.00%
Kenneth Rogoff
American
888
0
0.00%
Simon Johnson
British-American
859
0
0.00%
Martin Feldstein
American
764
0
0.00%
Alan Blinder
American
585
0
0.00%
Justin Wolfers
American
567
0
0.00%
Jonathan Gruber
American
209
0
0.00%
Laurence Kotlikoff
American
95
0
0.00%
Ernst Fehr
Austrian-Swiss
4
0
0.00%
Amongst Economist articles Piketty is an even more extreme outlier. I’ve found no evidence in The Economist Style Guide that the publication requires the use of nationality or profession when introducing individuals, and the data show this is true of other economists. In conclusion, I’ve absolutely no idea why the newspaper so frequently introduces him as the “French economist Thomas Piketty”, but they certainly refer to his nationality and occupation a great deal more than they do of his peers.
This list was criticised on publication (not least by The Economist itself a few days later) for including no women and being overly academic.↩︎
MUJI, the minimalist “no-brand” Japanese retail store, sells an excellent collection of stationery. Usually after removing any stickers or packaging from their products there is no branding left. However, I’d argue that their products are branded in the sense that they are distinctly recognisable, particularly by their quality. MUJI stationery is not the cheap, prototypical “no-brand” stationery that you might purchase from a supermarket, for example.
MUJI fountain pen and notebook
I don’t have too much to say about the MUJI fountain pen. Unusually for a sub-$20/£20 pen it has an all-aluminium body. The design is simple, but looks a lot better than similarly priced pens. The nib is a Schmidt fine, and its fine. It writes fine. It flexes fine. It looks fine. I prefer Bock nibs, but I’ve no major complaints about the Schmidt nib. The pen can take an international converter or cartridge, although I only had luck fitting some international converters into mine (I suspect it might have a manufacturing defect as the nib sometimes wobbles a little).
However, my main experience of MUJI pens is not with the fountain pen, but with their gel pens. Today, MUJI sell round polycarbonate gel pens in a wide variety of colours and point sizes. Conveniently, you can buy them in bulk and purchase refills too. For an inexpensive gel pen, they write smoothly and you can buy them with very thin line widths.
MUJI hexagonal gel pen
My favourite MUJI pen is no longer sold as far as I can tell. At least as recently as 2018, MUJI sold hexagonal polycarbonate gel pens. I’ve owned dozens of them, and they were popular amongst my friends and family: to solve a lifetime of pen purchases, one friend even bought all the refills in stock in a San Franciscan MUJI.
By the summer of 2019 I couldn’t find them anywhere: I checked MUJI stores across cities and continents. They’re absent from MUJI’s website (although a picture on the fountain pen page clearly still shows one).
Although the current round pens carry a similar refill and write just as well, I’m still a little sentimental for the hexagonal pens. I alternated between fountain pens and these MUJI pens for most of the mathematics I wrote at university: their narrower line width was useful for drawing out intricate symbols next to prose.
For the time being I’ve got plenty of the pens and their refills kicking around, but I’d love to know the story of their disappearance.
Alongside most of the world I am working from home amidst the Covid-19 crisis. The UK will review its lockdown tomorrow, but it will be a long time before life returns to normal. The extra time afforded by my significantly shorter commute has given me the opportunity to cook, watch movies, and enjoy my fountain pen collection.1
I bought a Lamy 2000 after completing my undergraduate degree, but used it little through my master’s. It had long been my grail pen but I had no need to write Verilog by hand, so it remained largely unused.2 Prior to the 2000 I owned the Lamy Studio, Vista, and Safari. All of these are great pens and exploration inevitably lead me to the 2000.
My immediate reaction to the 2000 was that it looked so much cooler than all my other Lamy pens. The Studio certainly has a distinctive shape and clip whilst the Safari/Vista design is purely functional and almost authoritarian: the triangular grip dictates how you must hold the pen.
On the other hand, the 2000 is ingenious in its simplicity. Ignoring the cap, you’d be forgiven for thinking the pen is a single part. The joins separating the body from the grip and the body from the twist mechanism are deliberately obscured. Unlike most fountain pens, disassembly is rarely required as the pen can be refilled just by dipping it in ink and rotating the end cap. This unibody design predates the MacBook by forty years.
Although enamoured with the pen’s appearance, I didn’t initially enjoy writing with it as much as I expected. I initially had a faulty pen that leaked and ink didn’t flow well through the second nearly as well as some of my TWSBI or Pilot pens. However, over time I adjusted to the pen, and found I preferred the “fine” thickness to my other, thicker nibs. The rhodium-plated gold nib is also the smoothest nib I’ve ever used, and surprisingly forgiving on poor quality paper. Today I have no complaints whatsoever about the functionality of the pen, and I’ve never had difficulties caring for or cleaning it.
Expensive fountain pens tend to be heavier than their cheaper counterparts, especially north of $200. In part this is due to the use of metal parts over plastic, but I suspect it mostly plays into the psychology of heavier objects feeling more substantial and therefore more valuable. The 2000 eschews this, and is instead finished in Makrolon (polycarbonate) so that it weighs in at just 25g, little more than the 17g Lamy Safari, even though it costs an order of magnitude more. I’d argue that this gives the 2000 a significant advantage over other pens in its price category: I can hold it and write with it for much longer than a Pilot Vanishing Point, for example.
Like the Lamy Studio — but unlike the Safari — the 2000 gives you flexibility in the way you hold it. The grip isn’t entirely symmetrical: it cuts off to form a straight edge with the nib. When viewed from below the symmetry returns: the outline of the nib mirrors flat area around the breather hole.
The 2000 features a narrow window near the section to indicate remaining ink. Windows are a common feature of Lamy pens, but unlike the Safari the slits only give you a vague sense of how much you’ve got left. Although windows are certainly useful, I don’t particularly like it as it edges away from the design’s uniformity. The window doesn’t feature on the “metal” finish of the pen, but inevitably I own the pen in black. The pen is light enough that the filled and unfilled weights are noticeably different.
A disadvantage of the uniformity is that the pen loses modularity: there is no choice over nib or ink refill mechanism. This is not entirely a bad thing: I’m a great lover of bold designs that are unafraid to make choices for you.3 In any case, I can’t imagine there are many people installing a $200 gold nib in a $20 Safari.
The 2000 is by far my favourite pen. I’m certainly not alone in my love for this pen and my affection is perhaps even clichéd. However, I believe represents the best of what fountain pens can be: comfortable to write with, easy to hold, and a hell of a great design. It is to this pen I point when I need to justify my view that fountain pens are the best writing instruments we have. In times such as these, we should celebrate that which represents the very best of what we can be, if only to bring a little more cheer into the world.
My most recent experiment was fresh pasta: using only a rolling pin to roll and fold the pasta probably burned more calories than I actually consumed.↩︎
I didn’t enjoy typing the Verilog too much either, but I was at least happy with the final processor that I designed for my thesis.↩︎
I have a fantasy of a “zero-decision” restaurant: you would walk in, be seated and served a single starter, then main, and finally dessert. Each course would be partnered by a single appropriate wine. Perhaps finish with coffee. Then leave, paying a bill that includes the tip and taxes, rounded to a suitable pleasing amount. No choice whatsoever: the only decision you can make is to walk through the door. My libertarian side does not advocate that all restaurants should be like this, but I’d love to experience one.↩︎
If you’re a frequent traveler (or were, back in The Good Old Pre-Corona Days), you may have seen the British Airways Safety Video or its sequel. These videos are played at the start of flights with in-flight entertainment systems and feature British actors and celebrities but are otherwise like any other in-flight safety video.
The two videos feature Gillian Anderson, Rowan Atkinson, Jim Broadbent, Rob Brydon, Asim Chaudry, Warwick Davis, Chiwetel Ejiofor, Ian McKellen, Thandie Newton, Gordon Ramsay, Naomie Harris, Michael Caine, Joanna Lumley, Jourdan Dunn, David Walliams, and Olivia Colman.
Whilst watching these videos I’ve often wondered what else these actors have appeared in together: the videos deliberately have ensemble British casts, as do plenty of other films and TV shows (Love Actually, Harry Potter, Doctor Who, etc). Sadly I’ve now found time to assemble that list. Films and TV shows with more than two of the collaborators are in bold.
2012: Chiwetel Ejiofor, Thandie Newton
A Cock and Bull Story: Gillian Anderson, Rob Brydon, Naomie Harris, David Walliams
Accused: Naomie Harris, Olivia Colman
Animals United: Jim Broadbent, David Walliams
Any Human Heart: Gillian Anderson, Jim Broadbent
Arena: Jim Broadbent, Ian McKellen
BBC2 Playhouse: Jim Broadbent, Ian McKellen
Billionaire Boy: Warwick Davies, David Walliams
Black Books: Rob Brydon, David Walliams, Olivia Colman
Blackadder and Blackadder’s Christmas Carol: Jim Broadbent, Rowan Atkinson
Boogie Woogie: Gillian Anderson, Warwick Davies
Children of Men: Chiwetel Ejiofor, Michael Caine
Cold Comfort Farm: Ian McKellen, Joanna Lumley
Comedy Lab: Warwick Davies, Olivia Colman
Comic Relief: Doctor Who - The Curse of Fatal Death: Rowan Atkinson, Jim Broadbent, Joanna Lumley
Coronation Street: Ian McKellen, Joanna Lumley &emdash; this surprised me!
Cruise of the Gods: Rob Brydon, David Walliams
Doctor Who: Warwick Davies, Ian McKellen, David Walliams, Olivia Colman
Exiles: Jim Broadbent, Olivia Colman
Extras: Rob Brydon, Warwick Davies, Ian McKellen, Gordon Ramsay
Gangsta Granny: Rob Brydon, Joanna Lumley, David Walliams
Half of a Yellow Sun: Chiwetel Ejiofor, Thandie Newton
Harry Potter and the Half-Blood Prince and Harry Potter and the Deathly Hallows Part 2: Jim Broadbent, Warwick Davies
Hot Fuzz: Jim Broadbent, Olivia Colman
How to Lose Friends & Alienate People: Gillian Anderson, Thandie Newton
It Was An Accident: Chiwetel Ejiofor, Thandie Newton
Johnny English Reborn: Gillian Anderson, Rowan Atkinson
Jonathan Creek: Warwick Davies, Joanna Lumley
King Lear: Jim Broadbent, Ian McKellen
King of Thieves: Jim Broadbent, Michael Caine
Little Britain: Rob Brydon, David Walliams
Little Voice: Jim Broadbent, Michael Caine
Look Around You: David Walliams, Olivia Colman
Love Actually: Rowan Atkinson, Chiwetel Ejiofor
Maleficient: Mistress of Evil: Warwick Davies, Chiwetel Ejiofor
Marple: Rob Brydon, Joanna Lumley, David Walliams
Maybe Baby: Rowan Atkinson, Joanna Lumley
Mr Morgan’s Last Love: Gillian Anderson, Michael Caine
Murder in Mind: Rob Brydon, Chiwetel Ejiofor
Not the Nine O’Clock News: Rowan Atkinson, Jim Broadbent
Paddington: Jim Broadbent, Asim Chaudry
Paddington 2: Jim Broadbent, Joanna Lumley
Play for Today: Jim Broadbent, Ian McKellen
Prince Valliant: Warwick Davies, Joanna Lumley
Pudsey the Dog: The Movie: David Walliams, Olivia Colman
Red Nose Day Actually: Rowan Atkinson, Chiwetel Ejiofor
Revolting Rhymes: Rob Brydon, David Walliams
Richard III: Jim Broadbent, Ian McKellen
Room on the Broom: Gillian Anderson, Rob Brydon, David Walliams
Run Fatboy Run: Thandie Newton, David Walliams
Screen Two: Jim Broadbent, Chiwetel Ejiofor
Shaun of the Dead: Rob Brydon, Chiwetel Ejiofor
Sherlock Gnomes: Chiwetel Ejiofor, Michael Caine
Solo: A Star Wars Story: Warwick Davies, Thandie Newton
Spider-Plant Man: Rowan Atkinson, Jim Broadbent
Stardust: Ian McKellen, David Walliams
The Chronicles of Narnia: Prince Caspian: Warwick Davies, David Walliams
The Crown: Olivia Colman, Gillian Anderson
The Five(ish) Doctors: Ian McKellen, Olivia Colman
The Iron Lady: Jim Broadbent, Olivia Colman
The Magic Roundabout: Jim Broadbent, Ian McKellen, Joanna Lumley
The One Ronnie: Rob Brydon, David Walliams
The Simpsons: Gillian Anderson, Ian McKellen
The Wednesday Play: Ian McKellen, Joanna Lumley
This is Jinsy: Rob Brydon, Olivia Colman
Twist: Michael Caine, David Walliams
W1A: Asim Chaudry, Olivia Colman
Walliams and Friend: Joanna Lumley, David Walliams
Walter and Walter & June: Jim Broadbent, Ian McKellen
War and Peace: Gillian Anderson, Jim Broadbent
The following lists the number of times each actor appears in the above list. Jim Broadbent and David Walliams must have superb agents as they clearly lead the pack.
Gillian Anderson: 10
Rowan Atkinson: 8
Jim Broadbent: 23
Rob Brydon: 13
Asim Chaudry: 2
Warwick Davis: 11
Chiwetel Ejiofor: 11
Ian McKellen: 15
Thandie Newton: 6
Gordon Ramsay: 1
Naomie Harris: 2
Michael Caine: 6
Joanna Lumley: 13
Jourdan Dunn: 0
David Walliams: 20
Olivia Colman: 14
The list excludes cases where actors appear as themselves, nearly all of them have appeared on The One Show or The Graham Norton Show at some point, but it’s unlikely that any of them will have appeared at the same time (and would probably be far too much research on my part).
The pedestrian crossing near Abbey Road Studios today
In normal times, tourists would disembark the Jubilee Line at St John’s Wood and walk down Grove End Road to imitate The Beatles’ famous album cover outside Abbey Road Studios.1 On my morning runs I’d usually see a group gathered outside the studios hoping to dodge the traffic for a moment to take their souvenir photo.
Today there was nobody.
As the world enters lockdown we’ll see many more photos of tourist attractions, business centres, and sports stadiums devoid of people. Right now, these photos seem strange: the very absence of people from our shared places makes them feel lonely, spare, and purposeless. Without tourists and Beatles fans, this is just a pedestrian crossing. Without traffic, it barely need serve that purpose.
News organisations should share these photos: they are evidence that people are following guidance to stay home, and that is newsworthy. On Friday evening, after Boris Johnson announced pubs must close, thousands descended on their locals to get in one last pint. It was disheartening to see people wilfully miss the point, but at least we’re now seeing that people can and will listen to government guidance.
However, when we look back at the Covid-19 crisis I don’t think we’ll reflect too hard on photos of empty streets and spaces, precisely because they are empty. This crisis wasn’t caused by people, but people can manage it, and images of what people have done and will do will have far greater lasting impact. Not all of that is good: raiding supermarkets shelves is a selfish and unproductive approach to the coming weeks.2 But in others we will see the very best of humanity, and we should record and celebrate their efforts.
All of this is to say that my photo of Abbey Road is fairly pointless; a momentary capture of an unusually quiet morning in North London.
Last week, I came across a group taking a similar photo at entirely the wrong pedestrian crossing a little further up Abbey Road. I’ve no idea if they’d made a genuine error or had eschewed the crowds outside the studios, but I found it delightful nevertheless.↩︎
A Sujiko puzzle. The digits 1-9 are arranged in each cell so that the value in each circle is the sum of the surrounding cells.
Sujiko is a puzzle often featured in British newspapers. The idea is simple: arrange the digits 1-9 in a 3x3 grid, using each digit exactly once, such that each 2x2 square’s sum matches a given value. To start the reader off, one or two of the cells are filled with clues.
My immediate reaction to discovering these puzzles yesterday is that they are ‘boring’, by which I mean trivially solvable by a computer. Secondly, I noted that the state search space for a potential solution is remarkably small compared to other common ‘newspaper puzzles’ like sudoku: there are around 6.67 × 1021 possible sudoku puzzles, but just 9! = 362,880 possible Sujiko puzzles. However, with 2 clues it is only necessary to check 7! = 5,040 possible digit permutations.
But the state search space can be further reduced! Once values for the five non-corner squares we can determine the values we would have to select for the corners (per the sum constraint); the solution is valid if we can select four values for the corners that have not already been used. Assuming two clues are given, this reduces the search space to 7 × 6 × 5 × 4 × 3 = 2,520 permutations in the worst case, but we can still do better!
Wikipedia notes two identities that can further reduce the search space:
In the case of the puzzle at the beginning of the article we only need to select one of 7 possible values for the centre square (x4), which then gives a value for the square to its right (x5). With a centre value selected and the opposite corner already known, we can find the value of the bottom-left corner (x6). From there we only need to fill x7 with one of four remaining digits: this will then constrain all other cells. Therefore there are only 28 permutations to check for the above puzzle — or any other puzzle with clues in the same position (including symmetry).
For any arrangement where the two clues are directly opposite (e.g. in x1 and x7 or x3 and x5) we should firstly fill the centre (x4) with one of 7 possibilities and then another non-corner (e.g. x7) with one of 6 possibilities. From there we can derive all other cells.
For arrangements where the 2 clues are on the same diagonal, It is then only necessary to select one of 6 values for one of the non-corner cells, from there another cell value can be derived, and after that only of four values needs to be selected for another non-corner cell: after this all other cell values can be derived: 24 permutations should be checked in all.
For puzzles with only one clue it is only necessary to place one value (of a possible 8), and preferably to minimise the number of subsequent permutations to check. In the worst case only 8 × 42 = 336 possibilities need to be checked.
From what I’ve seen, puzzles with 2 clues are labelled ‘hard’ whilst puzzles with a single clue are ‘extreme’ in difficulty. Clearly enumerating these by hand would be incredibly dull, but these can be enumerated in well under a micro second on a computer.
Last night I threw together a general purpose solver for these puzzles, and in my experiments it can solve the general case in under 3 μs (alternatively: it could solve every single Sujiko puzzle ever published in a British newspaper in under a thirtieth of a second). The main algorithm is just a recursive backtracking search with constraint propagation.
To accelerate the solver I wound up on a journey into SSE instructions (most of the puzzle state is stored in a single xmm register) at about 3AM, but I’m happy with the results. The solver could be accelerated further with a little more inline assembly to reduce main memory interaction and specialisation for each possible starting layout.
“Hey yo, I’m just like my country, // I’m young, scrappy, and hungry,” begins the song My Shot from the musical Hamilton. The image of the United States as a new, young nation independent from the empires of old is one reflected in both history and the present day: the history books tells us that the US is part of the “New World” that was “discovered” by Europeans in the modern era, and every year Americans celebrate their country’s birthday on the Fourth of July. However, when we consider the radical political change in the rest of the world since 1776 a different narrative emerges.
We begin by adopting and adapting the American definition: a nation began when it most recently adopted a new constitution or a law that declared a new nation, independence, or substantially different government. Ironically, this shifts the establishment of the US to 1787, when the constitution was ratified. Nevertheless, this definition places the US as the fifth oldest nation in the world, after the Vatican (1274), San Marino (1600), Morocco (1631), and Oman (1749).
This definition is far from perfect. The first problem is that nations are often established or re-established in homage to older nations. The modern Republic of France is politically divergent from the Kingdom of France1 yet they still occupy a similar territory, share the same name, and speak (roughly) the same language. Often when nations gain independence they revert to their pre-colonial borders and names, but with forms of government very distinct from colonial or imperial rule. The introduction of a formal constitution isn’t necessarily an indicator of a new nation: many just codify existing norms.
However, it isn’t necessarily wise to ignore governmental changes, because we would might miss the big gradual evolutions: the Roman Empire began in Rome in 27 BC, but the Byzantine Empire, one of its later forms, ended with the Fall of Constantinople in 1453 AD over 1,000km away. States are perhaps the biggest examples of the Ship of Theseus.
If we relax the definition of the establishment to most recent acquisition of independence or sovereignty the results remain similar: the US is the tenth eldest country.2 Even if we switch to first acquisition of sovereignty the US places 57th, which is still in the eldest third of countries.
Countries that first gained sovereignty or independence before the US are highlighted in brown. Former British territories are pink, former French territories are blue, former Spanish territories are yellow, and former Soviet states are red. All other countries gained sovereignty by other means.
The data are unsurprising when we consider events since the 18th century. The United Kingdom comprised separate kingdoms until 1707, and consequently any country that was not recognised as sovereign, but later gained independence from the British Empire later is newer. Plenty more countries formed during France and Spain’s decolonisation. The end of the imperial age affected the age of almost every country in the Southern Hemisphere from the early 19th century onwards. Eurasian sovereignty evolved radically over the 20th century as countries were absorbed into the Soviet Union, yet mutated once more before the close of the century with the bloc’s collapse. Simply put, US longevity depends on an early imperial exit and a distaste for communism.
An alternative definition would be to consider when the colloquial name of a country changes. This is a helpful proxy for countries established before constitutions were en vogue but language evolution is a hindrance: England is not necessarily a distinct country from the (rather charming) Old English Englaland. Languages and nations evolve asynchronously. It would be unreasonable to fix the definition to a particular language; using English would just reflect the international politics of the Anglosphere.
Ultimately, regardless of the path we take, any attempt to unambiguously define how countries are established will see the US in at least in the older half of nations. This is primarily the result of decolonisation in the mid-to-late twentieth century and the later collapse of the Soviet Union: until many countries left these supranational blocs they didn’t necessarily fit our modern definition of a nation. It is perhaps also a testament to the influence of the US’s Constitution (and in turn the Magna Carta, amongst other documents) that the US has fit within the modern definition of a nation for so long, and that so many countries modelled their governments after the US.
Since the late eighteenth century, France has been a kingdom, a republic (1792), an empire (1804), a kingdom (1814), a monarchy (1830), a republic (1848), an empire (1852), a republic (1870), an occupied territory with a republican government in exile (1940), a provisional republic (1944), a republic (1946), and finally a revised republic (1958).↩︎
In order: Portugal (1139), San Marino (1503), Spain (1516), Sweden (1523), Morocco (1631), Bhutan (1634), Liechtenstein (1719), Oman (1743), and Nepal (1768).↩︎